自动收球机器人-编辑者:许瀚文
点击数:240
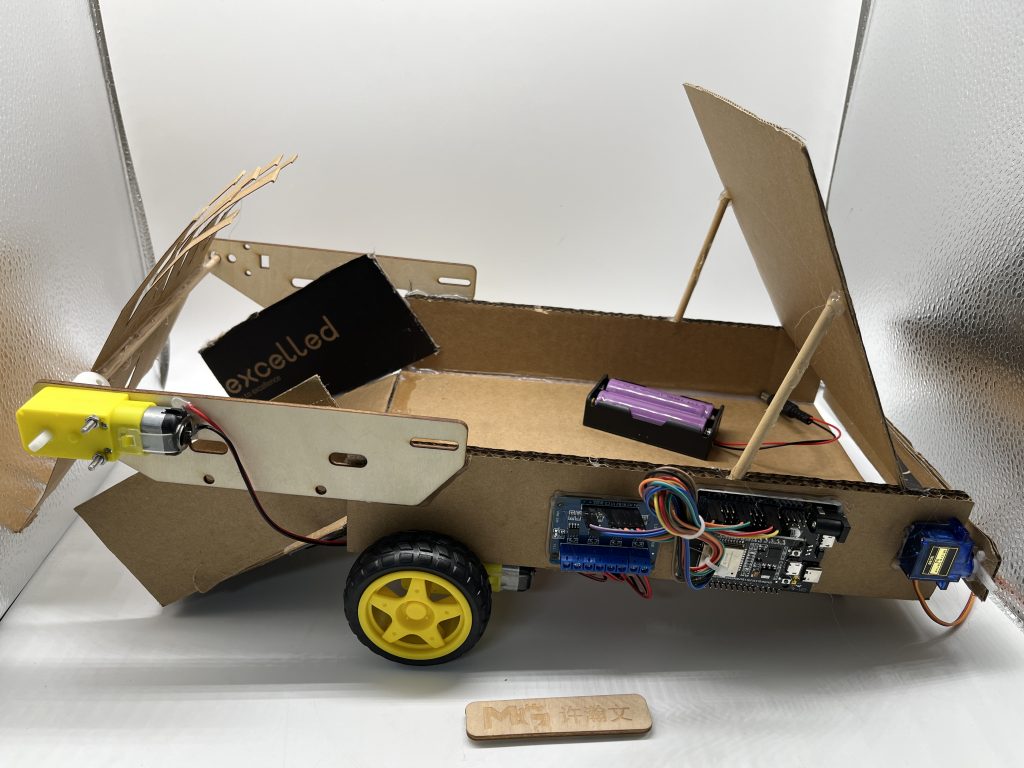
一、项目简介:可以用来帮忙收球,也可以扫干垃圾(如纸巾)。
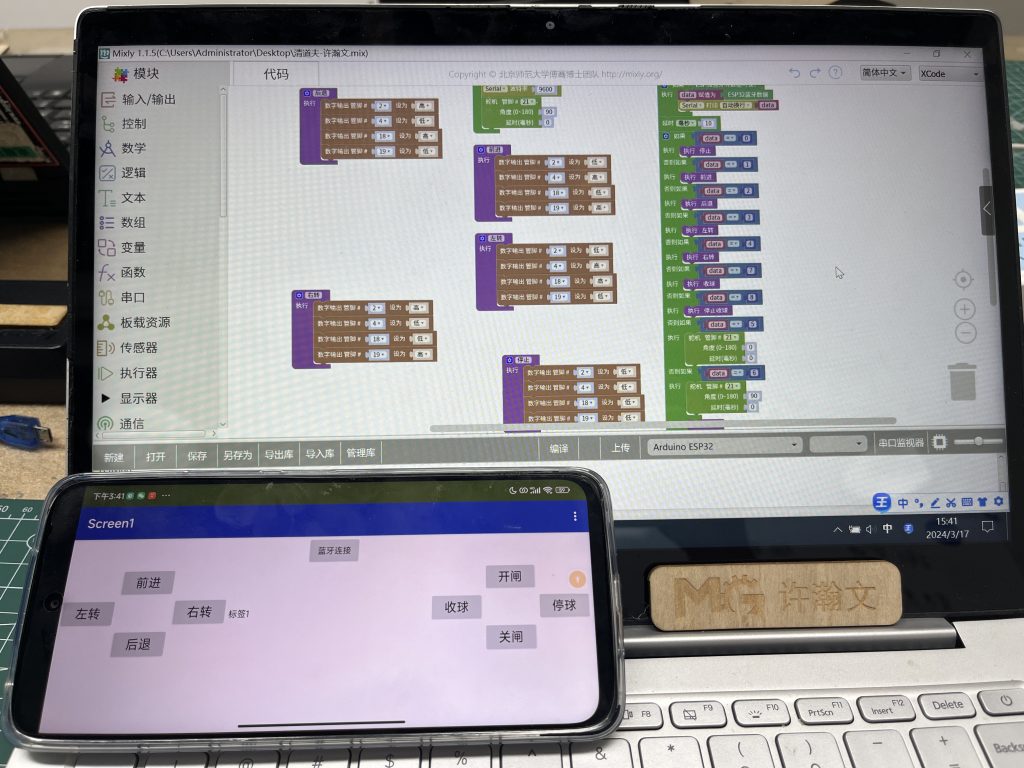
这是我使用APPinventer做的一个能控制机器人运动的界面,这是我根据自己手机调整的界面设计。
二、项目使用材料
1、电机驱动板一个
2、ESP32+扩展板*1
3、舵机一个
4、减速电机三个
5、万向轮一个
6、橡胶轮子两个
7、厚纸板
9、木棍
三、编程app及过程
1、用APPinventer编程手机端与电脑端的操控程序
2、用mixly编程机器人的运动
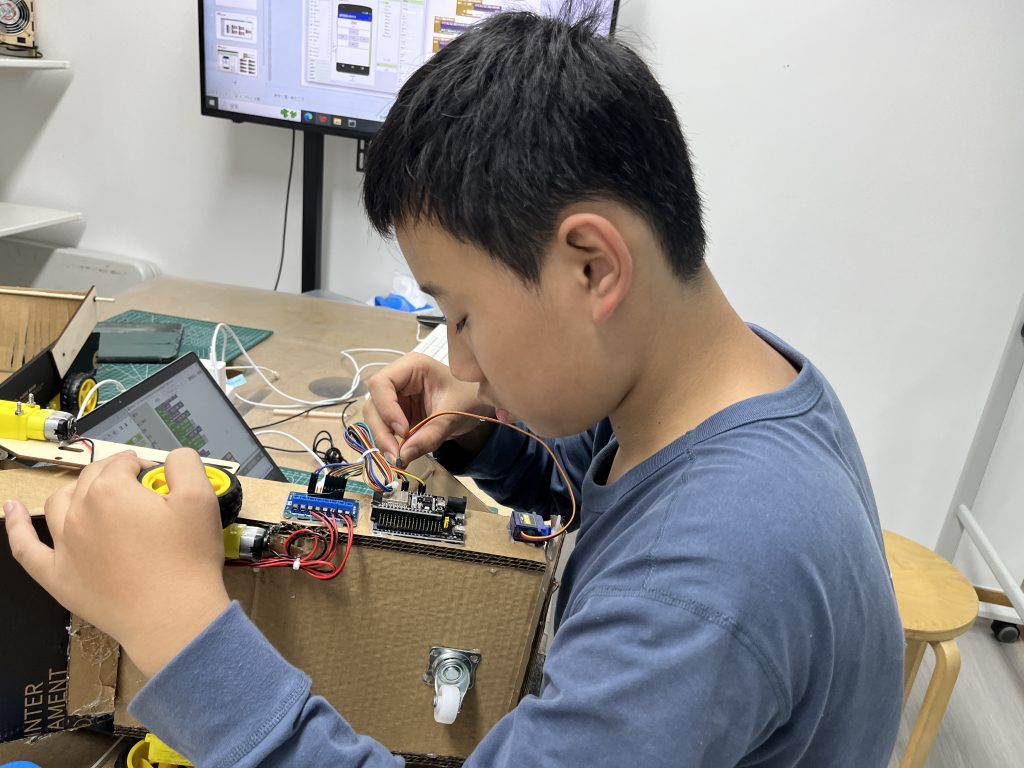
四、建造过程
1、建造主体结构,链接电路
注意按照接线图接线。
2、编程,连接机器与手机
代码尽量简化,方便查阅。

3、修正,测试
仔细检查,检查模组是否发热!!!

使用纸皮制作的,从纸皮的中心位置固定在木板上,然后把纸板剪成一条条,这样纸皮就变软了,不至于在转动过程中,卡到障碍物就堵转电机。
测试,发现机器人的尾部放球的装置,开闸与关闸弄反了。后来通过调整程序,改回来了。
遭遇的困难
第二节课,机器人的轮子已经编程完毕。在测试时却发现前进时方向不准,在轮子上打胶依然没用。在我即将放弃时老师帮我修正了方向上的问题,原因是万向轮在行进过程中角度不对,无法转动。老师用胶枪固定了万向轮的方向,让方向问题得以解决。
当我沉浸在完成的喜悦中时,意外却发生了。电机驱动板突然冒起白烟,整个板子完全报废。幸好我第一时间将线拔掉,这才没有将其他部件一同烧掉。老师第一时间判断出是电压的问题,给机器人装上了电阻。一切都回到了刚开始的时候,重新接线、测试,整个人直接就摆烂了。最后在老师的帮助下才又把它装了起来。
总结
作为一个已经被纳入比赛项目的机器,在帅气的外表之下蕴藏着研发者一次又一次的失败与艰辛。尽管我只完成了一个简易版的收球机器人,可依然遇到了许多困难,很难想象选手们是怎么在那么短的的时间完成的。
心得总结:
注意检查接线,防止炸机。
拍下接线图,以防意外。
在打胶前检查部件是否位置正确。