《乒乓球捡球机器人》-傅宇桢、管一安-作品复盘-2023.3.11
点击数:362
项目名:乒乓球捡球机器人
姓名:管一安、傅宇桢
学校:麒麟中学
年级:八年级

一、项目功能介绍
乒乓球机器人的主要可以用来捡乒乓球。主要可以应用在两个方面:1,用来消遣娱乐。比如居家期间无聊的时候可以用来娱乐,与家人或朋友一起合作比赛。在生活中想放松一下也可以用机器人自娱自乐。2,可以在乒乓球馆里进行捡球,机器人可以代替手捡或着工具,可以节省人力同时更加轻松简便。
二、项目所用材料
乒乓球捡球机器人主要用到的材料如下:
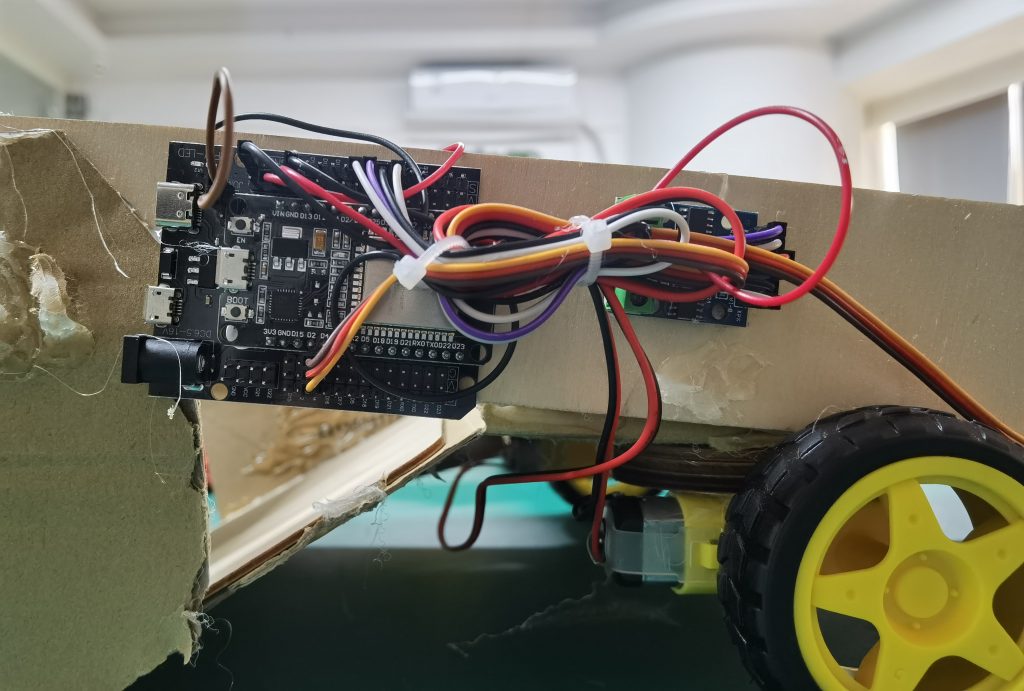
1、电机驱动板一个
2、ESP32
3、舵机一个
4、电机三个
5、万向轮一个
6、轮子两个
三、搭建过程中用到的软件
乒乓球捡球机器人用到的软件编程如下:
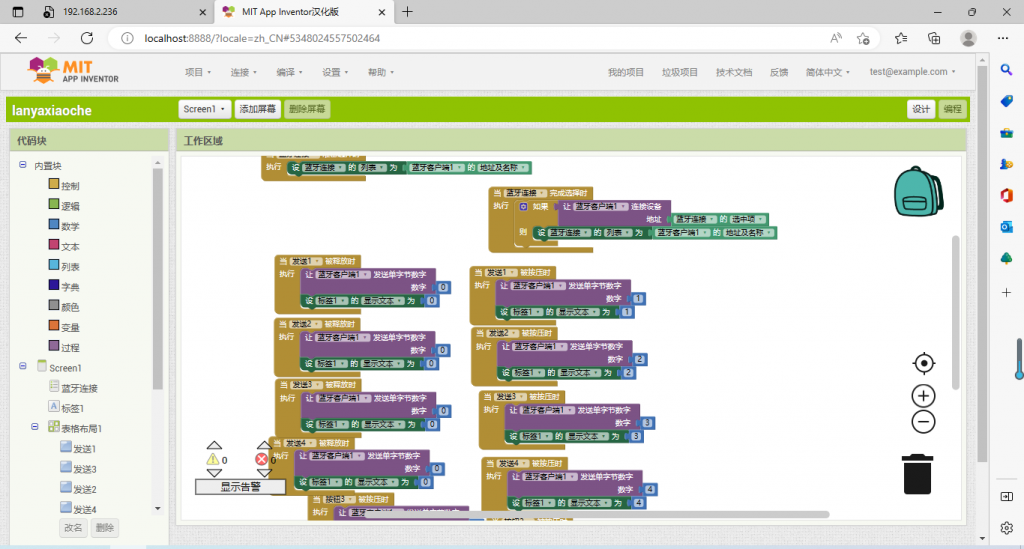
1、用APPinventer编程手机端与电脑端的操控程序
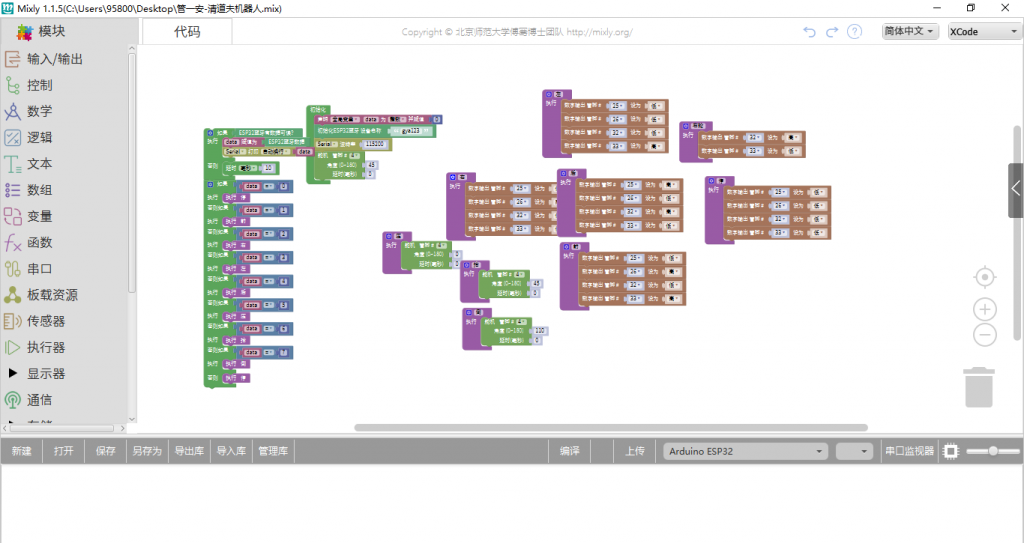
2、用mixly编程机器人的运动
四、乒乓球捡球机器人的搭建过程
小红迭代
初代机器人

初代机器人是用滴管来收集乒乓球
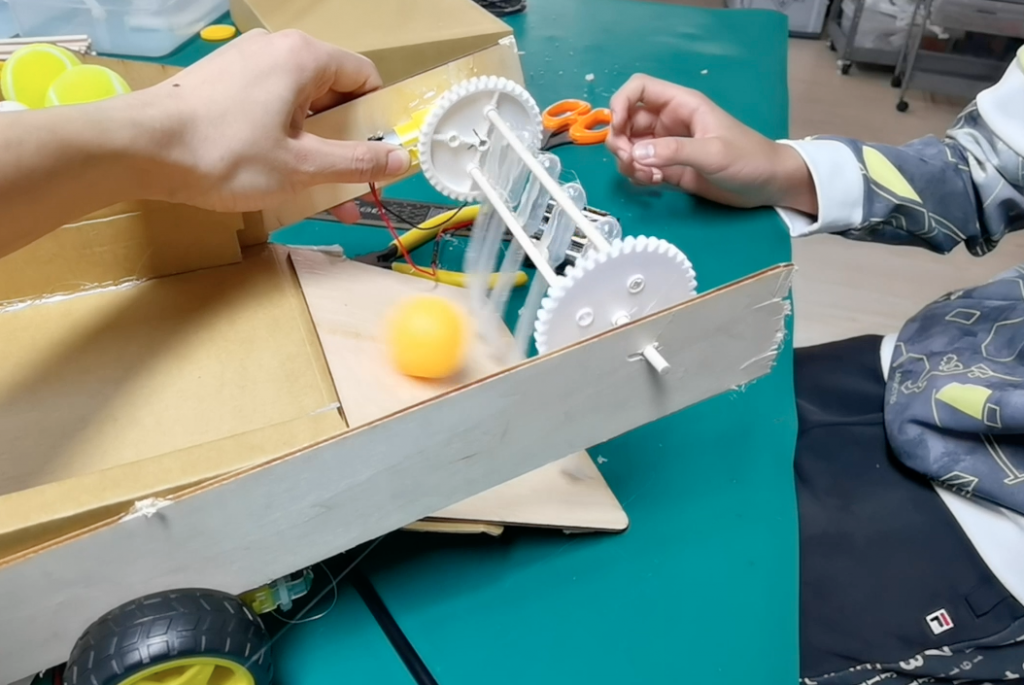
二代机器人
二代机器人是用卡纸来拨球的,因为初代滴管太软了
编程部分用的是APPinventer 和mixly
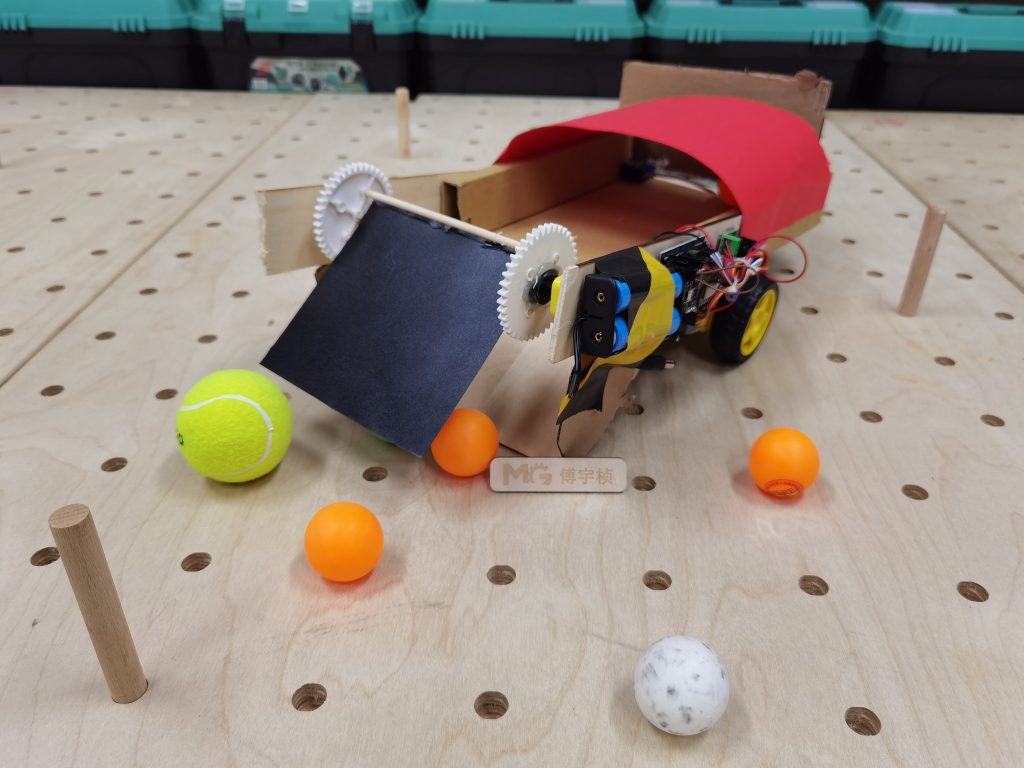
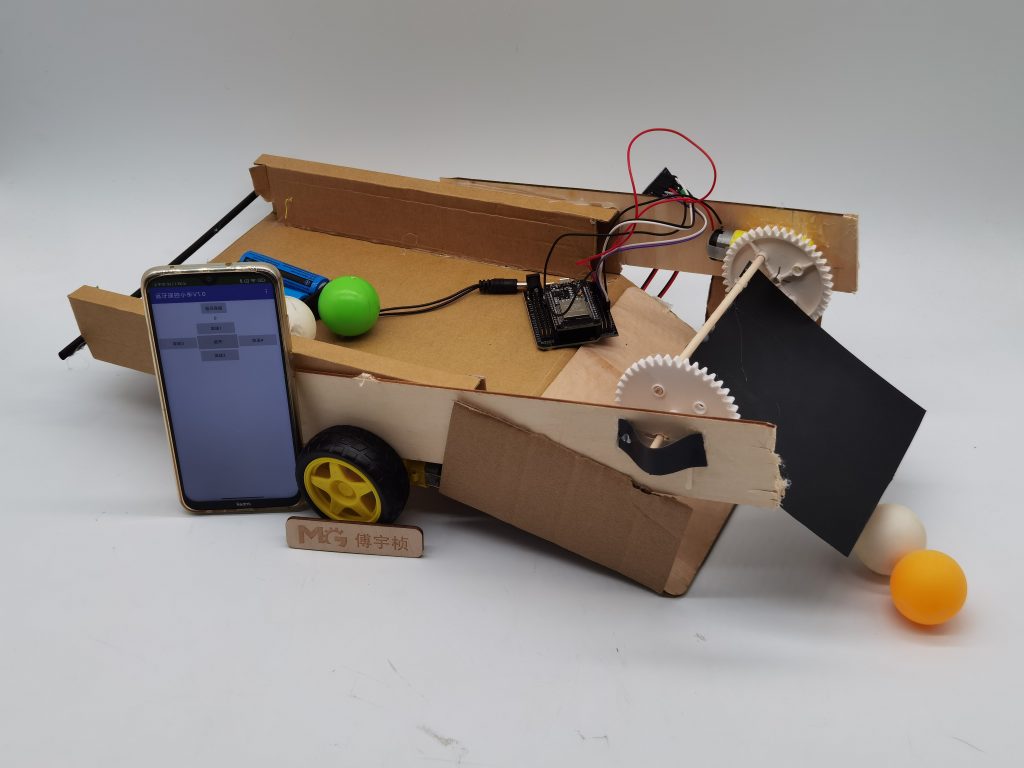
完成品
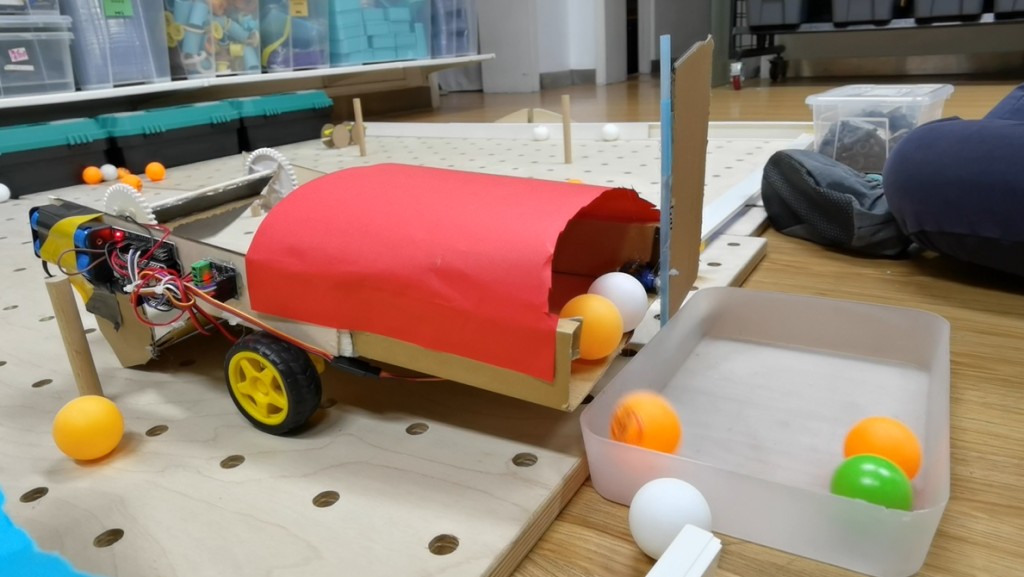

最后加了一张红纸
下面为机器人放球视频
小蓝迭代
草图:
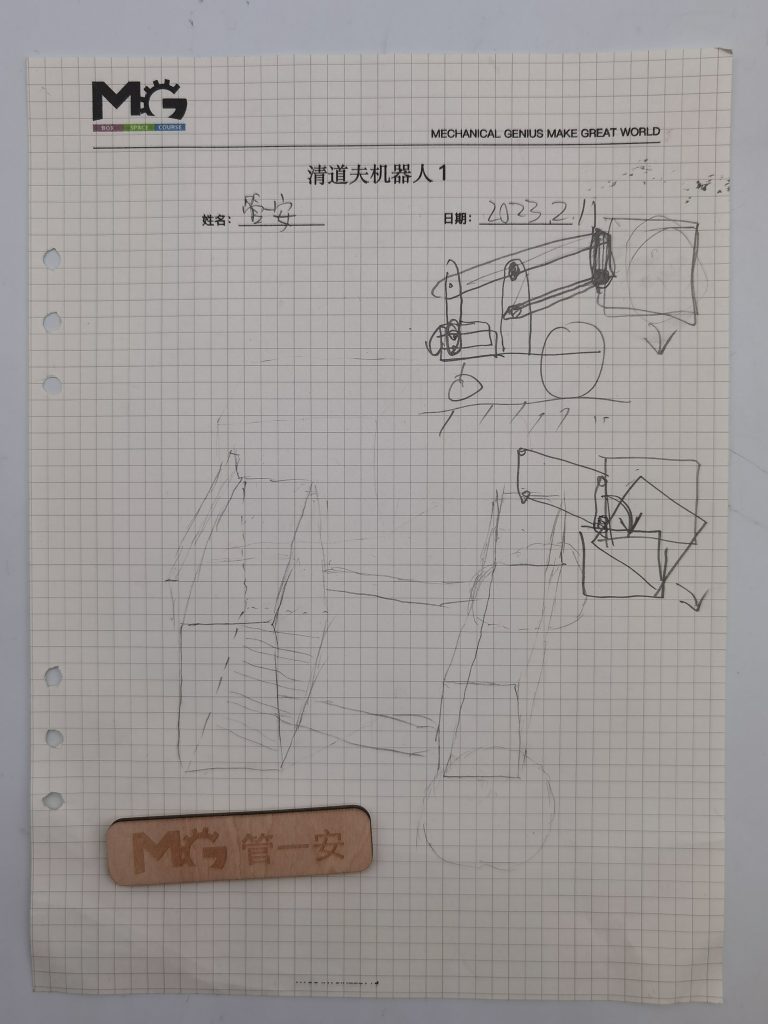
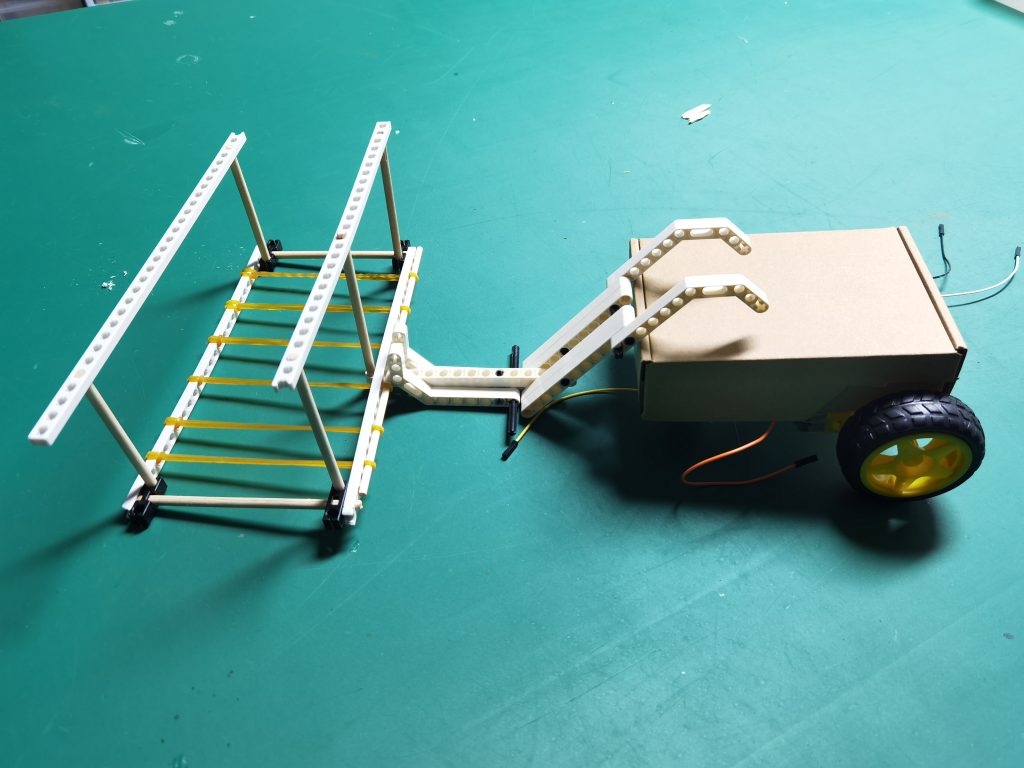
乒乓球捡球机器人1.0


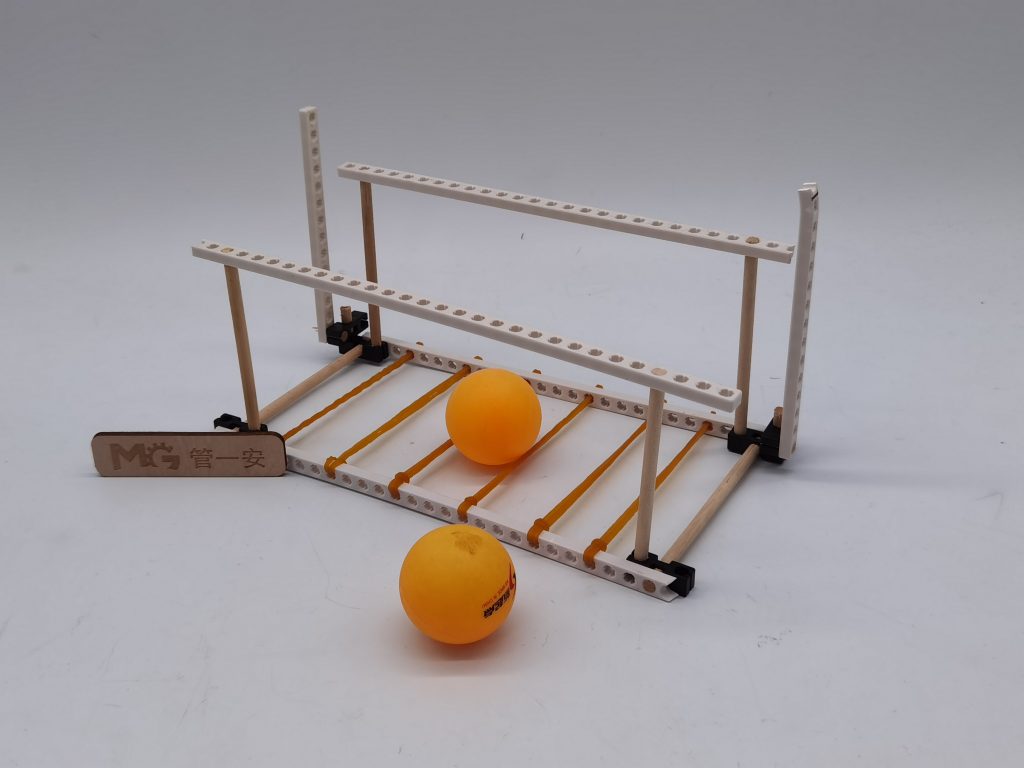
原理:皮筋具有弹性,压球时压力使皮筋被球撑开,而球自身质量较小,其重力无法使皮筋撑开,实现压球、收集功能
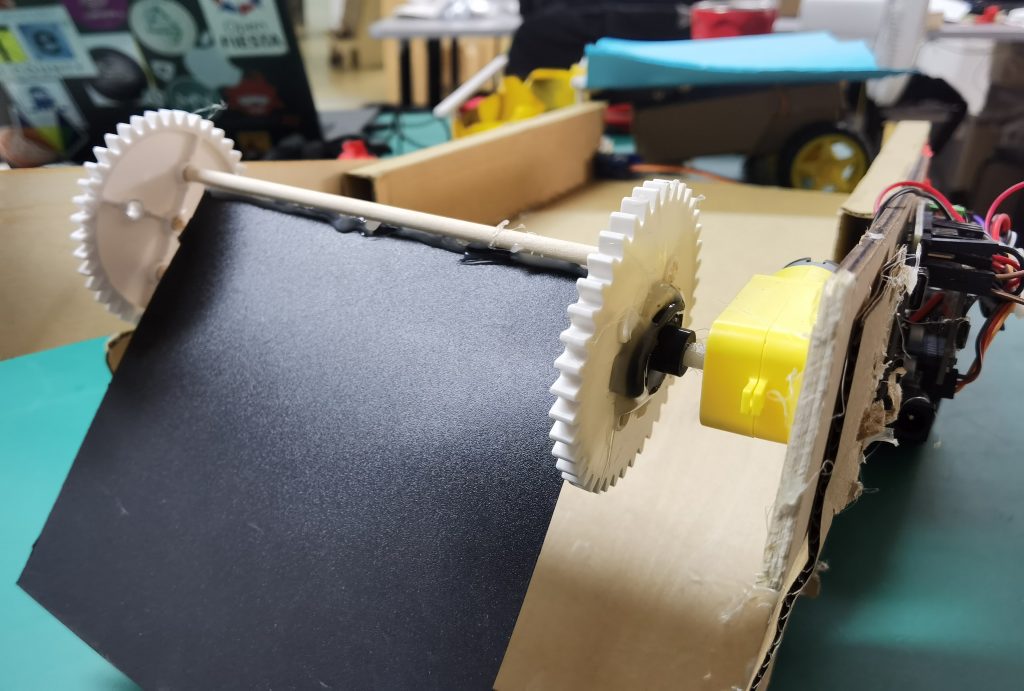
乒乓球捡球机器人2.0
乒乓球捡球机器人3.0

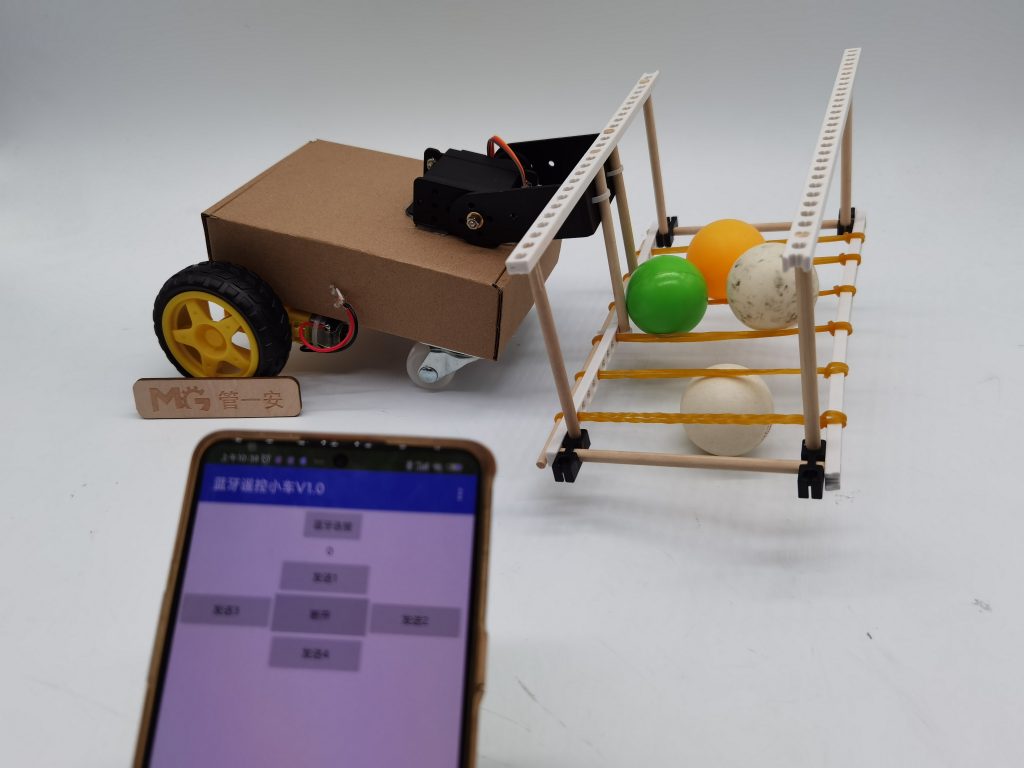
压球角度:0 倒球角度:110
乒乓球捡球机器人4.0


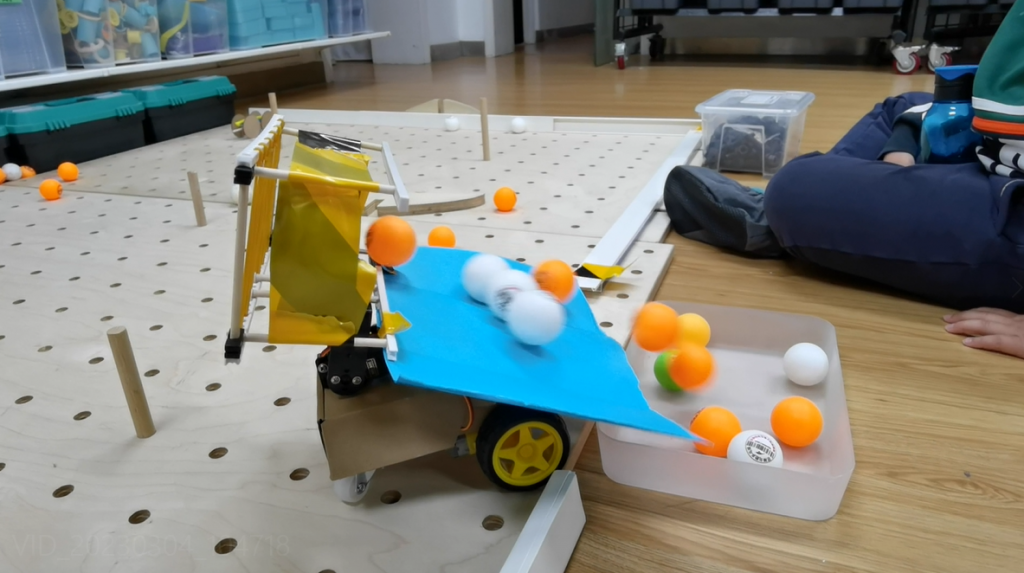
待完善:
应过于追求小巧灵活,导致重心不稳,方向操控不便